Série Rewind parte 1: Micro VANT (2012-2015)
Postado em 12 de Fevereiro, 2024
Este é o primeiro de uma série de posts (batizado de Rewind) que compreendem o meu período acadêmico na UFRN entre 2010 e 2021. Neles, vou contar sobre os projetos que estive envolvido durante as bolsas de iniciação científica e de apoio técnico e de pelo menos uma grande experiência que tive, longe de bancadas com equipamentos e programação.
No início...
Comecei a me envolver com o laboratório LAR (Laboratório de Automação e Robótica) antes mesmo deste ser seu nome (era simplesmente chamado de Laboratório de Automação, ou LabAuto como eu chamava) em 2011 como voluntário em um grupo de iniciação científica, onde comecei a aprender conceitos de programação embarcada e desenvolver técnicas de escrita para publicações. Porém, apenas em 2012 que me torno bolsista de IC (iniciação científica) no projeto do Micro VANT (código PVJ8776-2012), onde fui responsável pela programação do piloto automático utilizado (ArduPilot) e, posteriormente, responsável pelo redesenho da placa controladora.
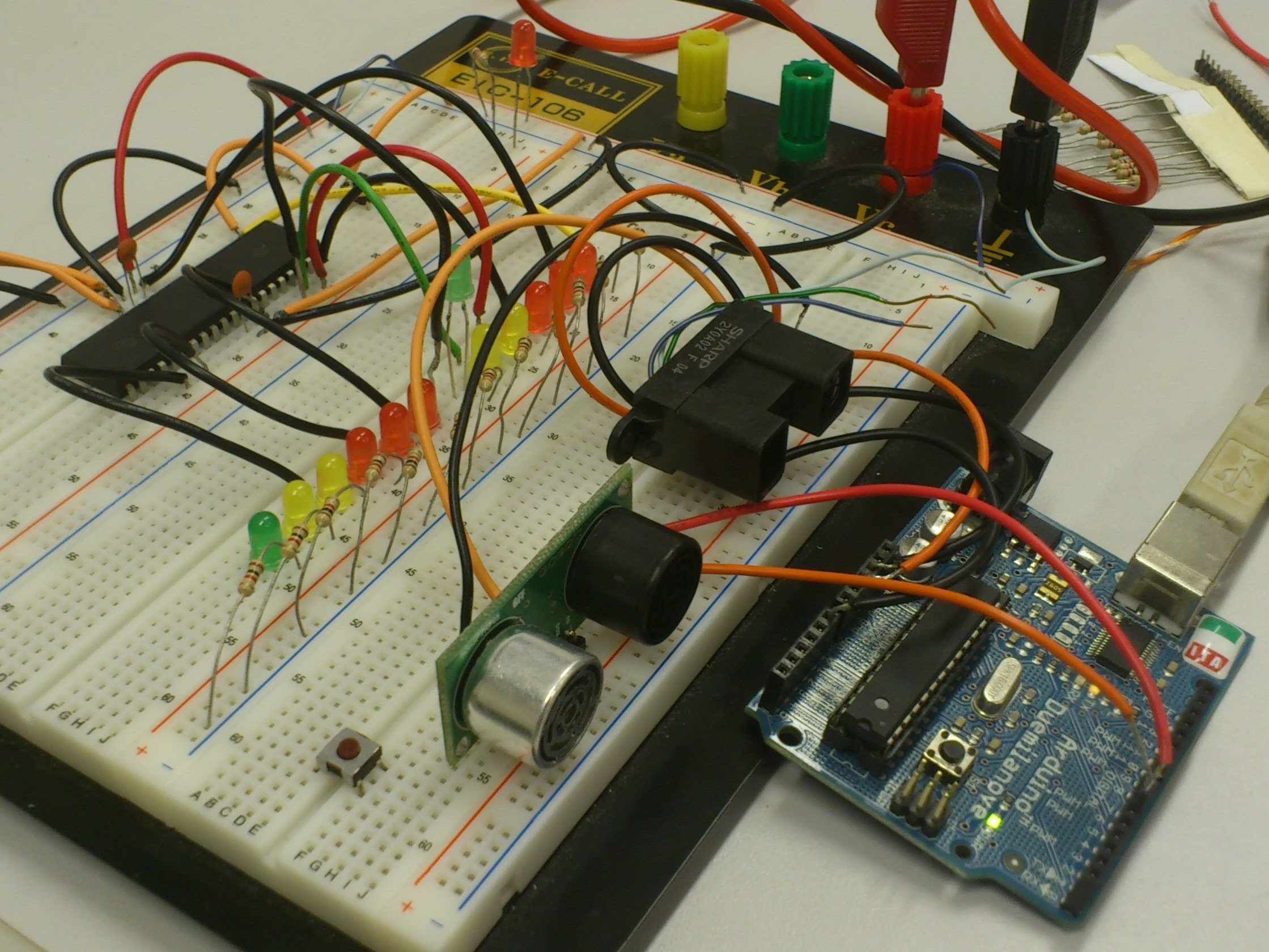
Iniciei aprendendo a programar em PICs, mas logo descobri os Arduinos.

A equipe do laboratório na Cientec de 2012.
Simulações
Inicialmente, como possuíamos apenas uma placa ArduPilot Mega (APM), foi necessário realizar simulações tanto com Software in The Loop (SITL) e Hardware in The Loop (HITL) para compreender seu funcionamento antes dos testes em campo, que poderiam ser catastróficos para a continuidade do projeto. Os testes em SITL haviam se provado muito difíceis de serem realizados com o conhecimento que possuíamos e dada a pouca documentação existente na comunidade online, então direcionamos a atenção ao método HITL, onde obtivemos êxito.
Eventualmente conseguimos simular um APM em um Arduino Mega (ambos possuíam o mesmo microcontrolador), o que tornou todos os testes muito mais fáceis de serem realizados.
Em determinado momento cheguei a testar um controle de PlayStation como um rádio sem fio enviando sinais via encoder PPM direto para a placa Arduino Mega, que executava o código presente na APM.
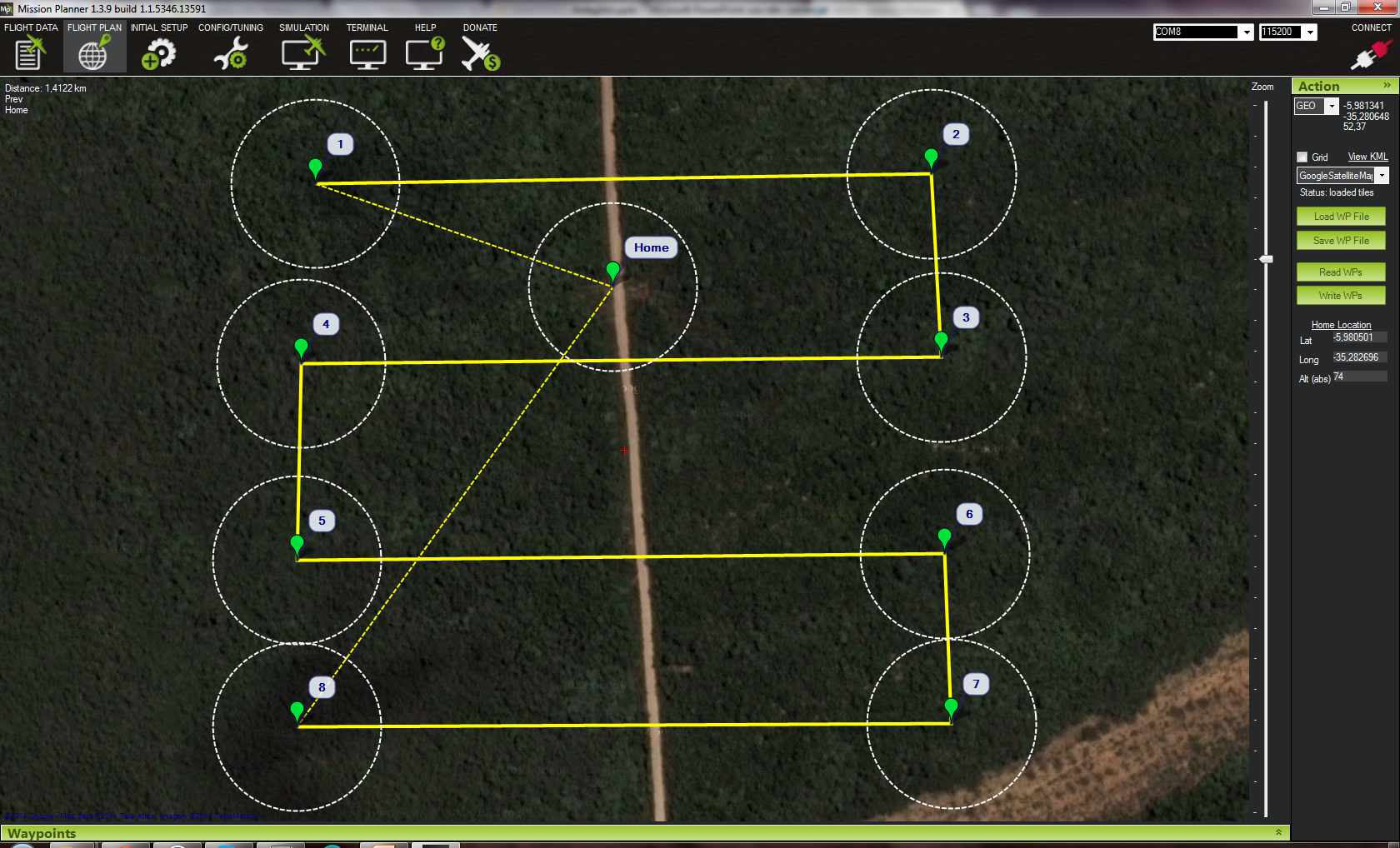
Simulação de voo autônomo por waypoints, sem loop após finalização (ao invés, realiza loiter no waypoint "home").
Testes em campo
Em setembro de 2014 conseguimos com sucesso fazer o primeiro voo autônomo com uma asa voadora, conforme pode ser visto no vídeo abaixo. Conseguimos programar corretamente o piloto automático do APM e, após as simulações em laboratório, pudemos enfim testar em campo.
Vídeo onboard na asa voadora. O ano na data do vídeo está incorreto.
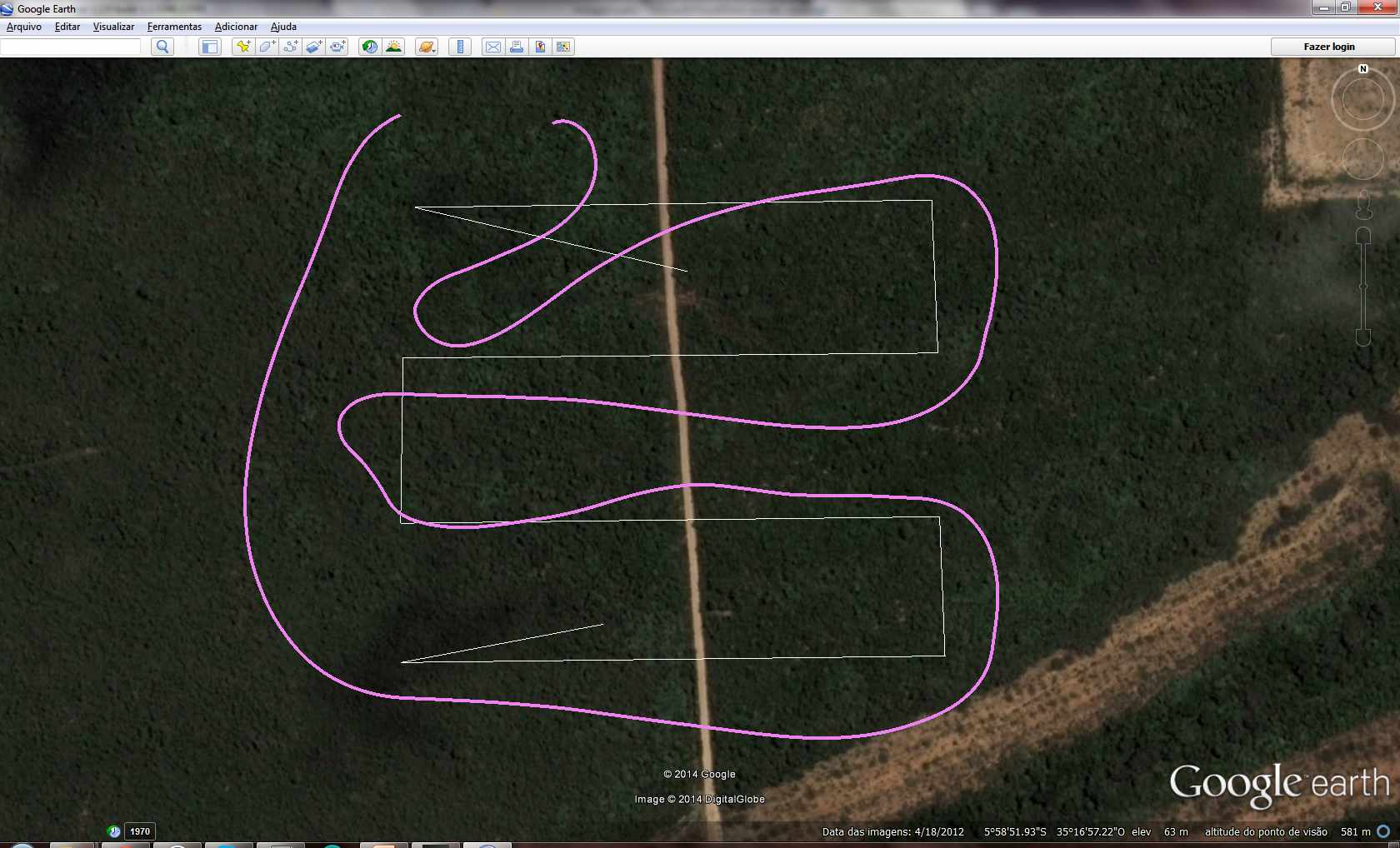
A rota programada (acima) e a realizada (abaixo).

A asa voadora utilizada. Fonte: Canal "Tudo Que se Move!"
Micro VANT e conclusão
Porém, para atingir os requerimentos de tamanho, ainda teríamos de reduzir o tamanho do VANT. Fizemos então os protótipos do micro VANT, mas a placa APM era pesada demais para voo estável e algo teria de ser feito para possibilitar o voo autônomo.
Um dos primeiros voos experimentais do micro VANT.
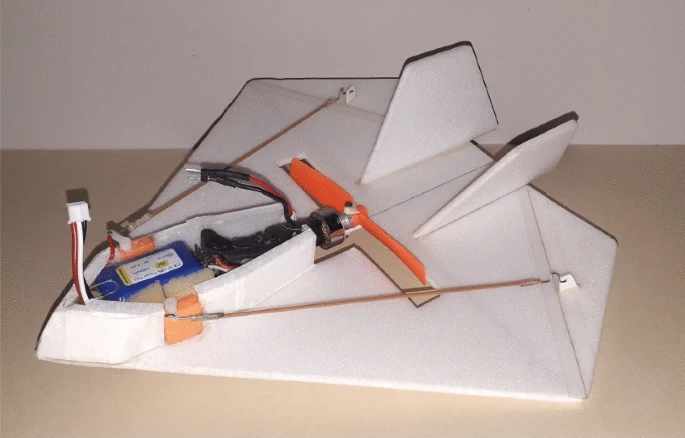
O micro VANT confeccionado pela equipe. Fonte: artigo publicado com os resultados do projeto
Entre o final de 2014 e 2015 percebemos a necessidade de reduzir o peso para aumentar a duração do voo. Tivemos então a ideia de tentar remover componentes não utilizados na placa APM e, se possível, redesenhá-la para distribuir seu peso mais uniformemente no corpo do drone, pois sabíamos que o projeto da placa APM é open source e criar outra versão dela, exclusiva para o projeto, seria possível. Foram solicitados equipamentos para a confecção das placas (o que acarretou a criação de outro laboratório, o ProtoLab) porém os insumos não chegaram a tempo do fim do prazo do projeto e as placas, que haviam sido parcialmente confeccionadas, já não tinham mais propósito e não foram concluídas.
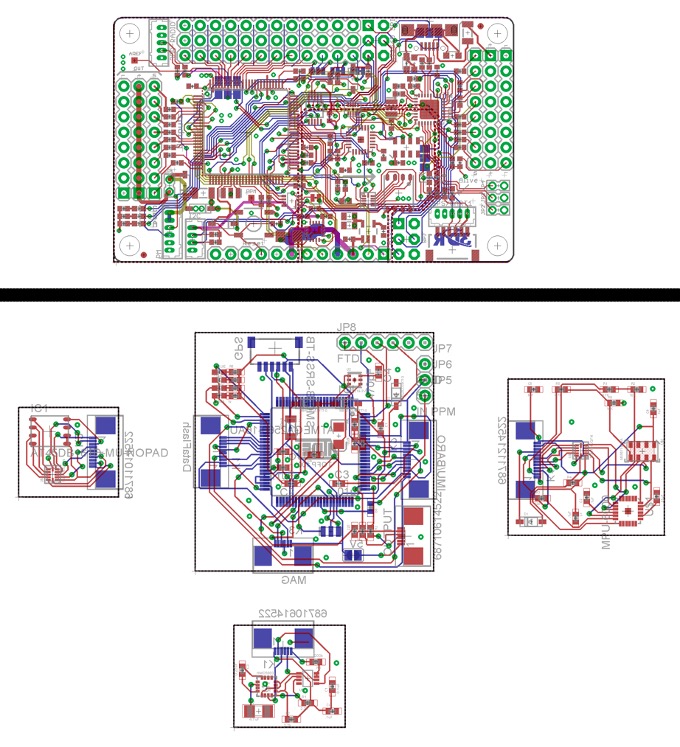
Layout com as placas em proporção 1:1, relativas à APM.
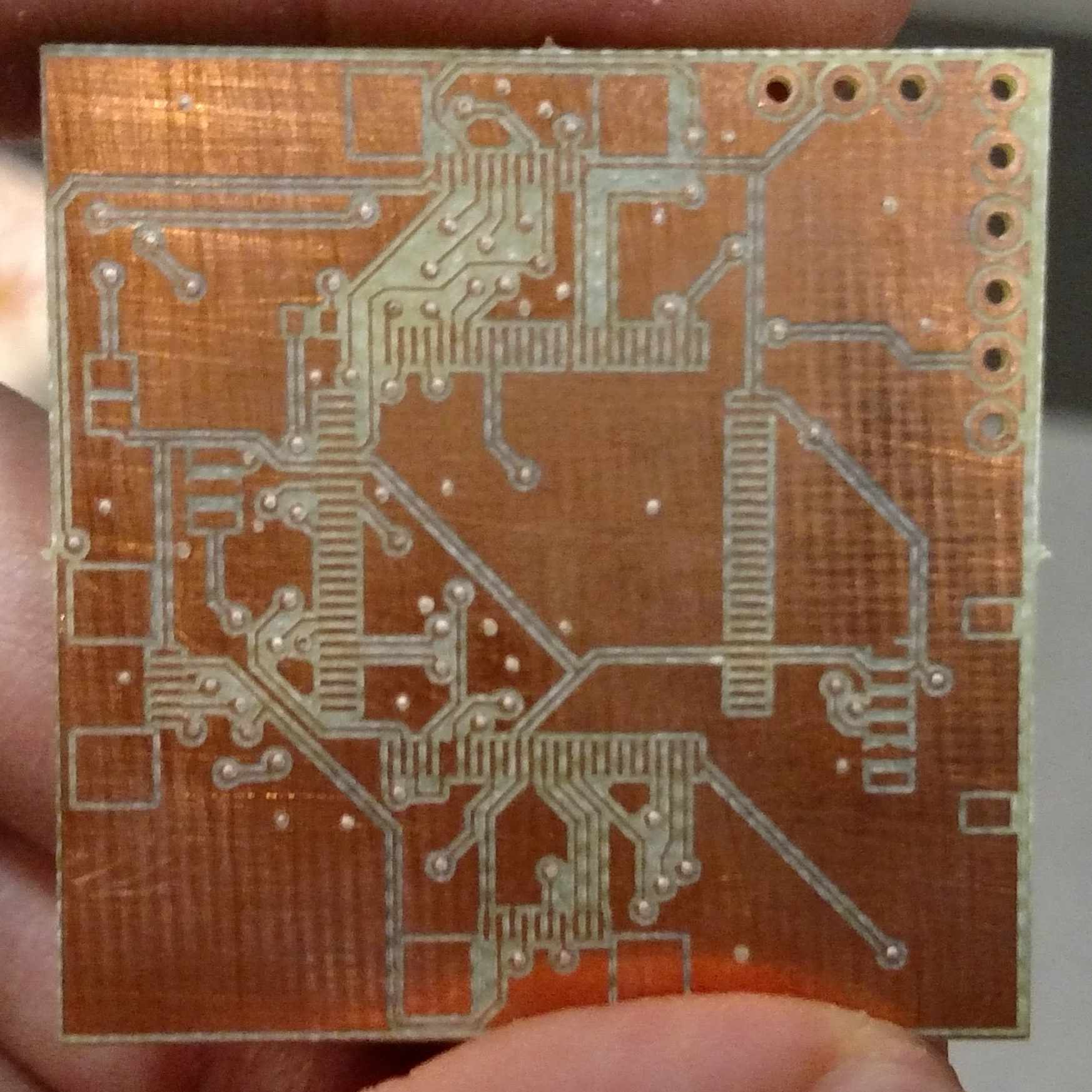
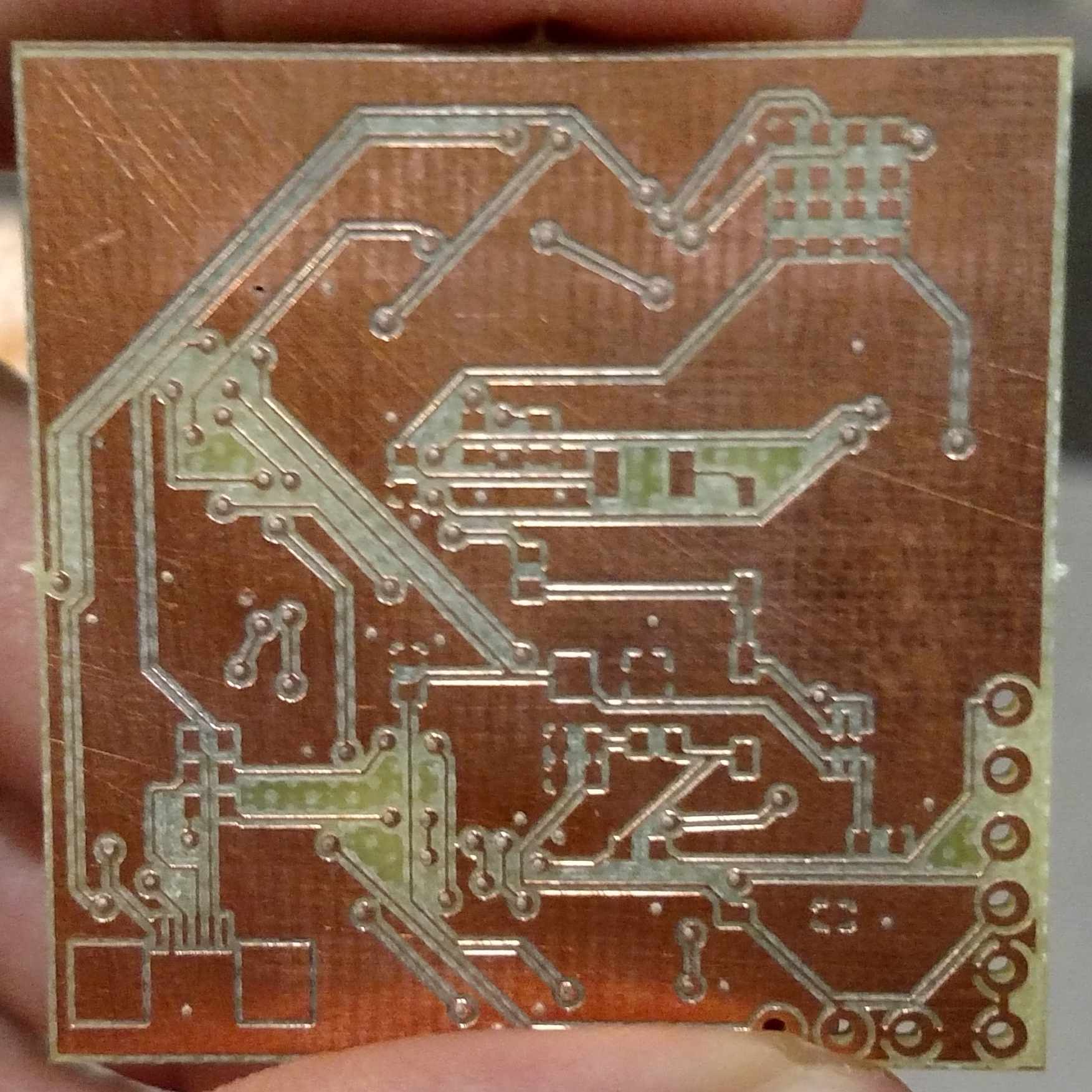
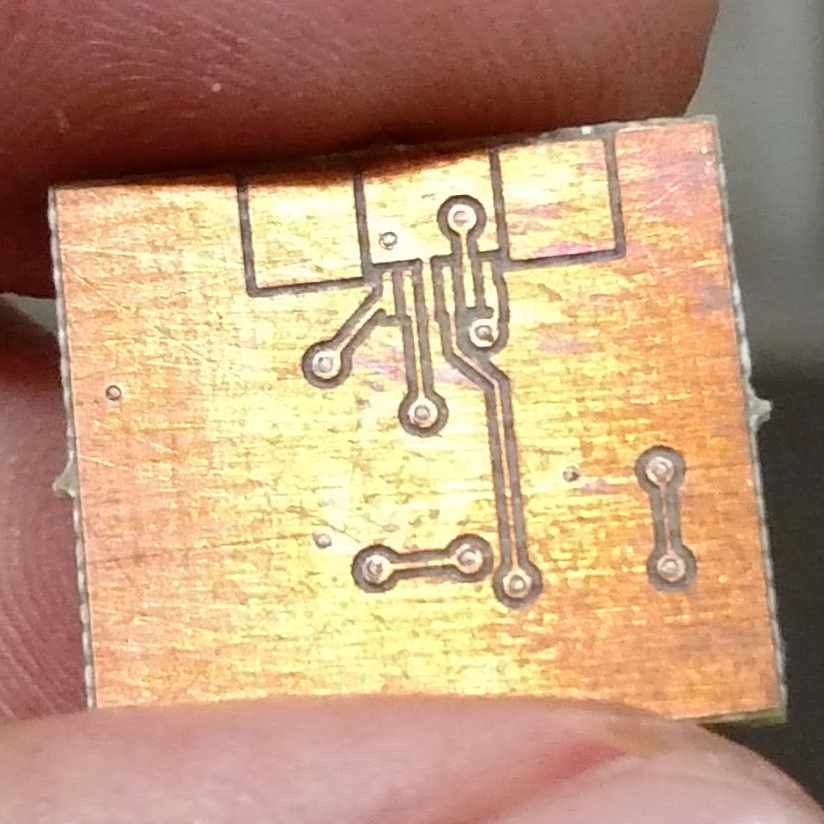
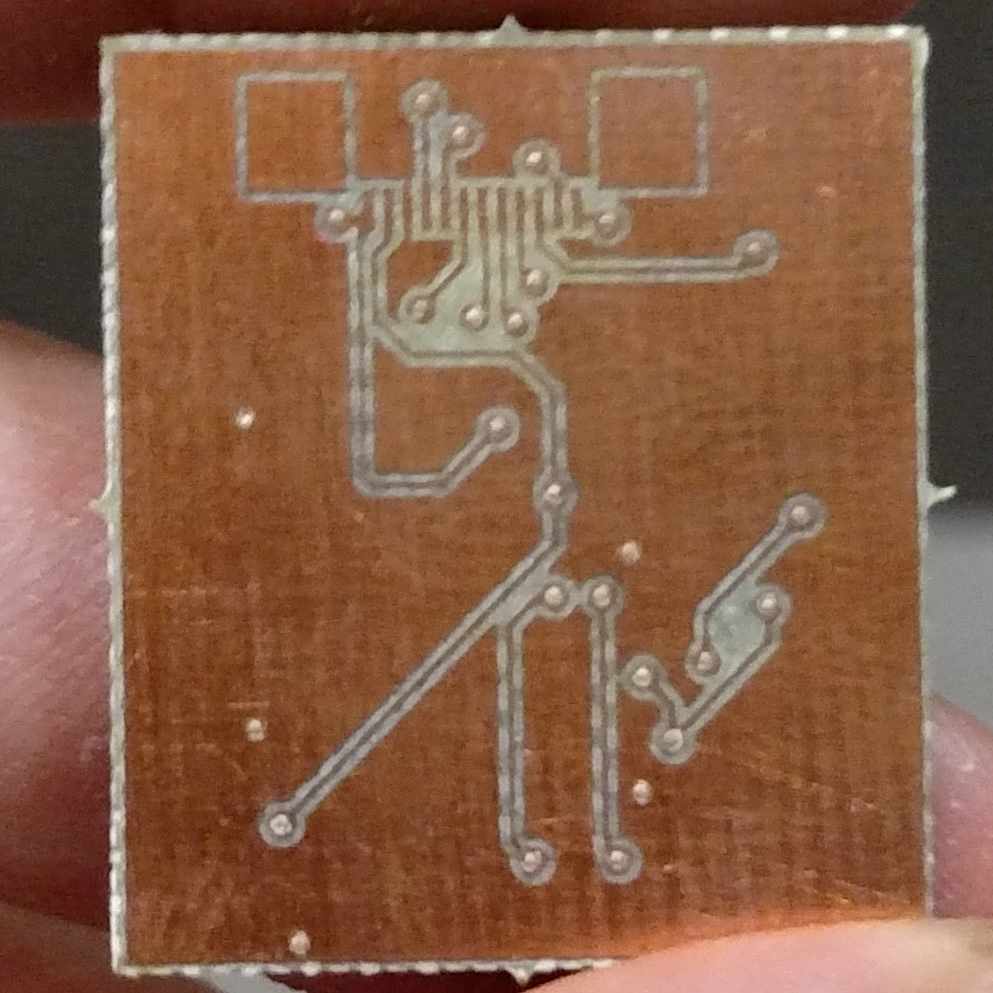
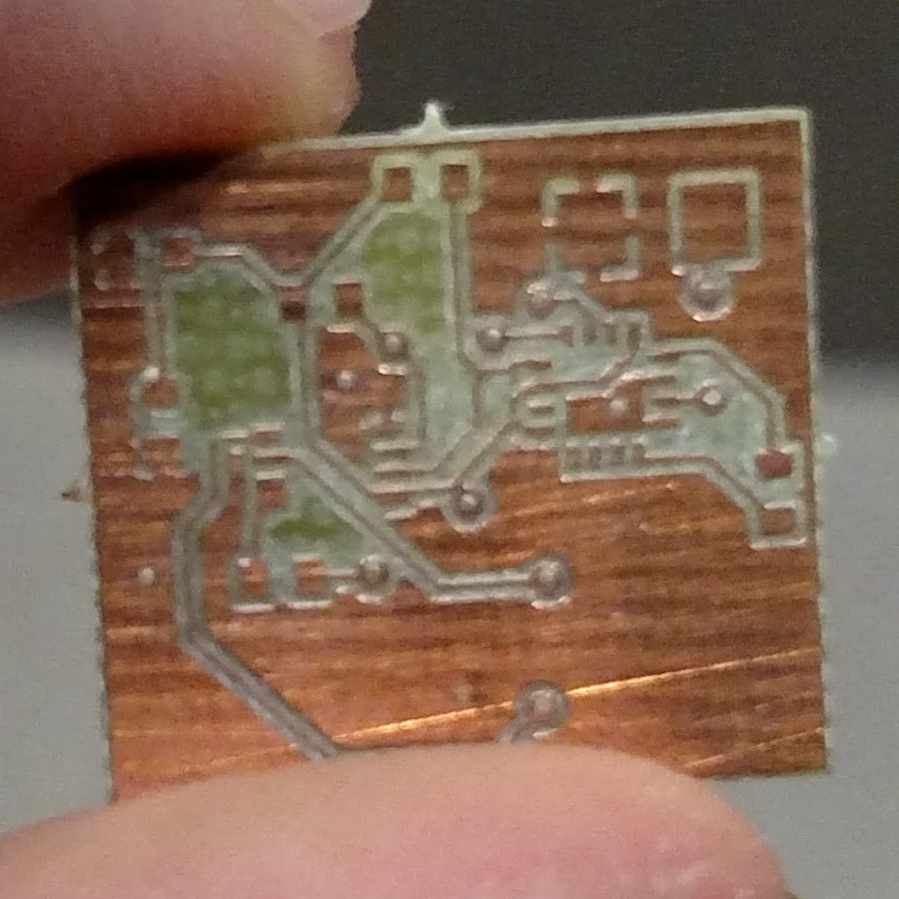
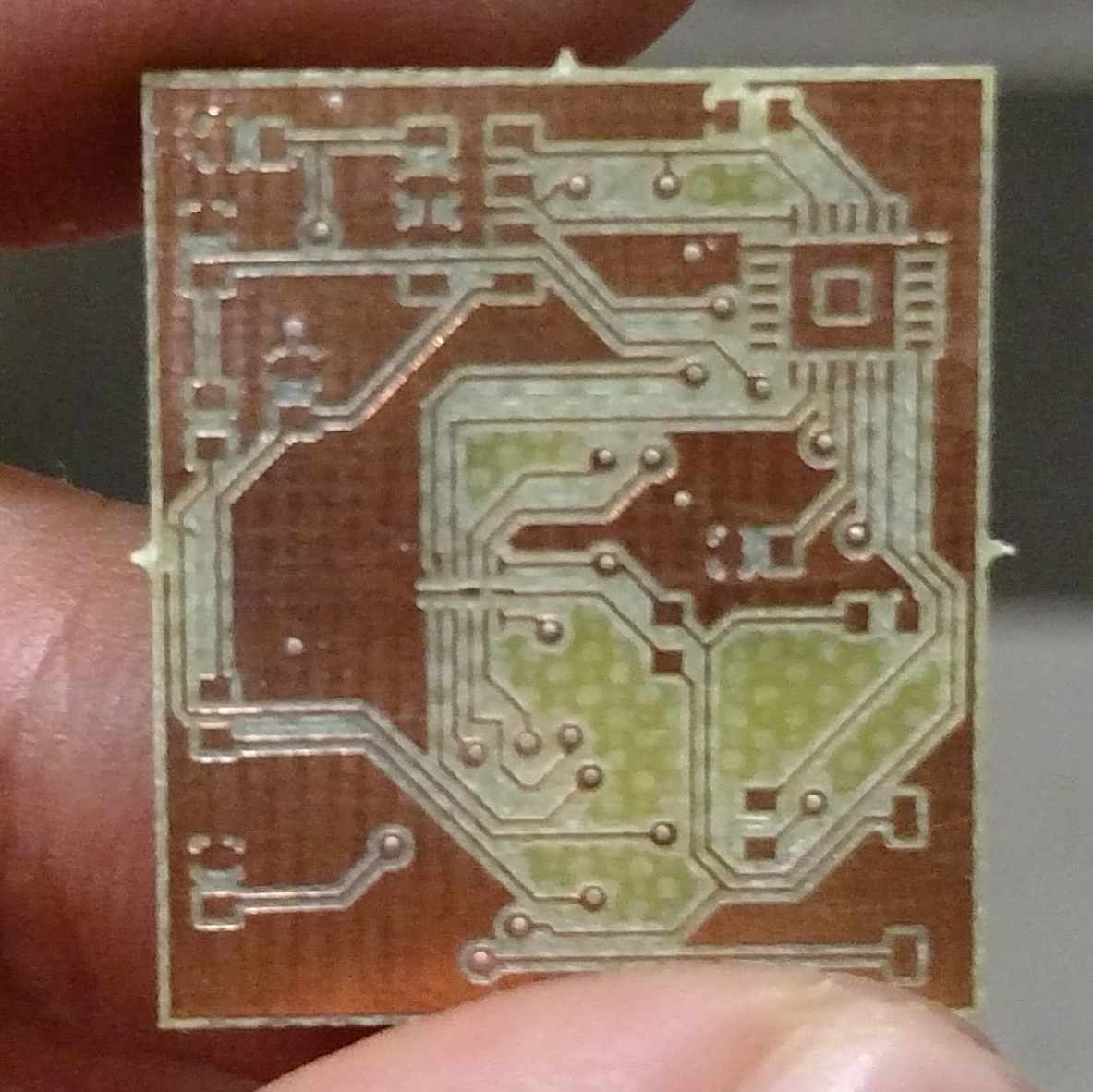
Algumas placas (frente e verso) quando foram confeccionadas, em setembro de 2015.